Link back to Home page
Link to typed notes
1. Into to Stats
Mean
Median: the middle value in an ordered list of observations
Model the most frequent value in the data
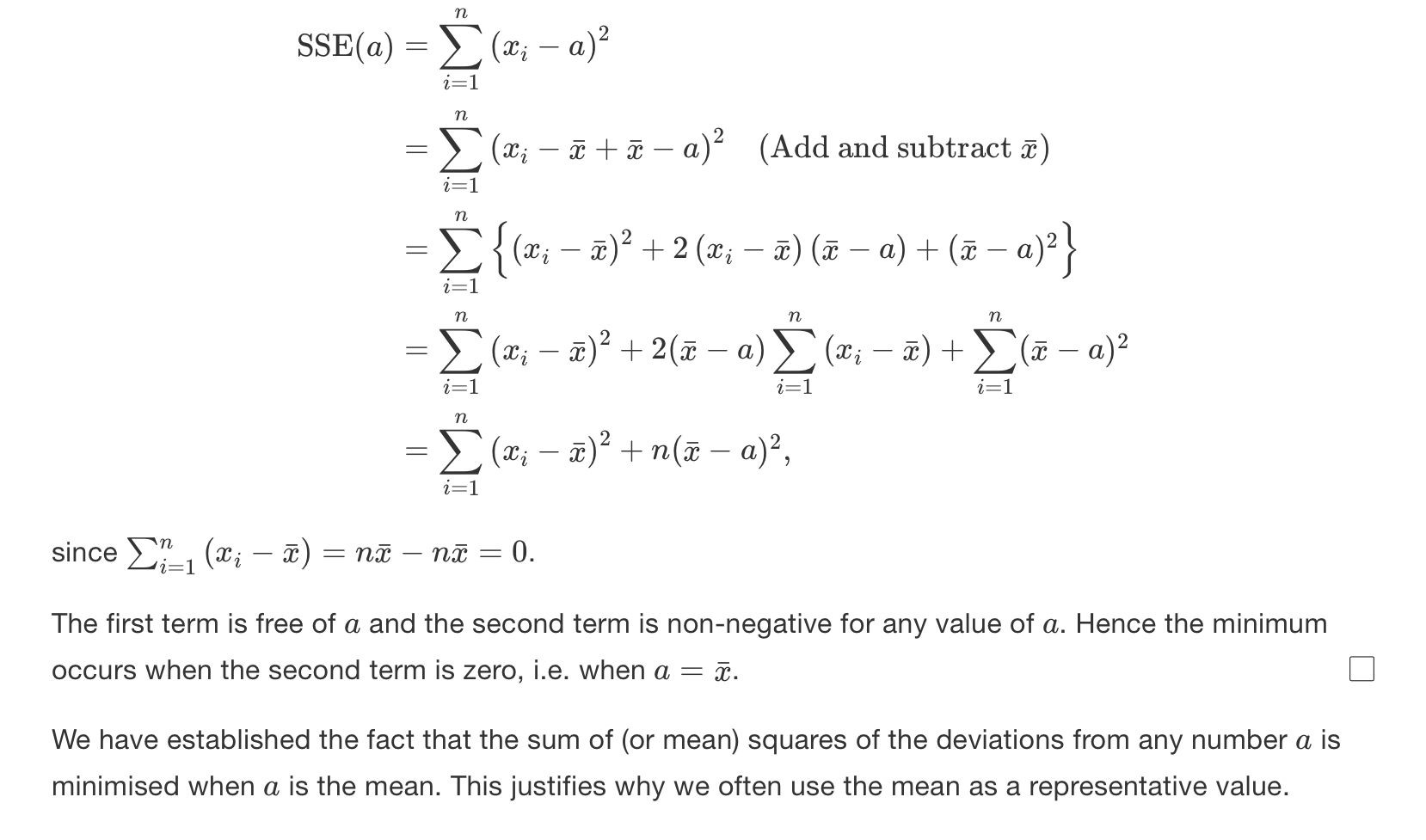
SSE = sum of squares of errors
SAE = sum of absolute errors
Theorem:
Theorem: median minimizes the SAE
The main idea is to look at slopes.. and then just find the value where the gradient changes from negative to positive
Proof is long and convoluted, link to it here, at some point it will make sense, until then, link here
Measures of spread
IQR = Interquartile range, difference between
The variance is:
Notice how the
And we found SSE is minimized at
So
To calculate the mean, we just divide by the the total population:
There is a reason we do
Proof of variance (not examined by still good for understanding)
However, there is a more useful form of the variance, the proof of which is given below:
Then we split the sum:
As the
Now using the definition of the mean:
So to rearrange
Therefore:
The standard deviation is the square root of variance
2. Intro to Probability
Definitions
Definition Random experiment: one in which we do not know exactly what the outcome of the experiment will give.
Definition Sample space - the set of all possible outcomes. Denoted by capital
Definition Event - particular result of the random experiment, a subset of the sample space. Denoted by capital letters
Everything that is random is denoted by a capital letters. Lowercase is where we have observed
Definition Union -
Definition Intersect -
Definition Mutually exclusive -
Definition Complement -
The statement above basically means that everything in A and not A is the sample space
Axioms of probability
Combinatorics
The entire point of this section is fairly simple: being able to count outcomes without listing them all
There are two main questions that will determine which formula we have to use.
- Does the order matter? If it does, then we use permutations, otherwise combinations
- Do we replace items after choosing? If yes, with we use the with replacement cases
Permutations
The scenario here is that we have
Think of it like filling
- The first sport can take
choices - The second spot can take
choices since the first one is already used - The third can take
choices and so on...
So the total number of ordered arrangements (aka permutations) is:
Multiply numerator and denominator by
Combinations
Now suppose we want to choose
In other ways, when we go from permutations to combinations, we don't care what order the items are chose in, only which items were chosen. So as we've already counted the same group multiple times for every possible order with permutations, we need to divide by how many times we've 'overcounted', which is
Conditional probability and Bayes’ Theorem
At its simplest, probability is just chance of an event, so it's:
Conditional probability is the probability event
The formal definition is given below:
When we arrange, we can get:
Bayes’ Theorem
Now, when we know something about one conditional event, but want to know about the reverse, we can use Bayes' Theorem:
We can derive the numerator by just substituting
Bayes' Theorem is used widely when in medical test scenarios as it allows people to update their belief about an event after new evidence appears. To think about using an analogy:
- We start with a prior belief
- Get new evidence
- And then we update our belief to
Independence
Intuitively, events
Knowing that one event happened gives you no new information about the other.
Notice how this is different to mutually exclusive, which means that both events cannot happen at the same time, so
Formally,
If
Then
Proof of Independence of complementary events
If
We want to show the following below:
And how using using the general addition rule, we can rewrite the above as
Given that
This can be factorise as:
Which simplifies to
3. Probability Distributions
Random variables are denoted by uppercase letters, like
A random variable is just a mapping from the outcomes space to the real line, so the combined probability of all values of a random variable is 1
Discrete Random Variable (DRV)
Definition
DRV - discrete random variable. If a random variable has a finite value
A DRV takes specific values, like heads in coin flips and we can count how many outcomes there are. We assign probabilities to each value individually:
And so to find the total probability up to some value
For a DRV, we define a function $$ f(x) = P(X=x) $$
The function
Continuous Random Variable (CRV)
Definition
CRV - Continous random variable. When a variable can take any value on the real line
There are infinitely many possible values, so the probability of hitting any exact number,
So instead, we can talk about densities, the probability per unit of
Probability Density Function (PDF)
This function essentially tells us how densely probability is packed around each value.
This is defined as:
That's why for CRVs, integration replaces summation, it's the continuous version of adding up infinitely small pieces.
For the pdf, we need:
Cumulative distribution function (CDF)
This function calculates the probability of the random variables up to its arguments:
For a DRV, it's defined as:
And for a CRV, the CDF is defined as:
So the CDF is essentially the area under the PDF curve up to
Relationship between PDF and CDF
For a CRV, the PDF is the derivative of the CDF
If
And we differentiate both sides with respect to
What this tells us that the PDF is just the slope of the CDF. Where the CDF rises, the PDF is large, lots of probability density there. And where the CDF is flat, the PDF is small.
Expectation
Think of expectation (or the expected value) as the long-run average value of a random variable if you repeated the experiment infinitely many times.
For example, if you roll a fair rice, the values are in the set of
Each roll has probability
Then
You'll never roll a
Formal definition
For a DRV with possible values
And for CRV with PDF
Same idea, we're just replacing the sum with an integral because now the variable takes infinitely many values
Expectation of a uniform distribution function
Say we have
The PDF is:
Then the expectation is:
Which is just the midpoint of the interval
Expectation of a function
If you have some function of the random variable say
- Discrete:
- Continuous:
This is extremely useful as it lets us find things like:
which is later needed for variance - etc.
Linearity of expectation
this is probably one of the most useful properties in probability.
For any random variable
The reason we can do this is because expectation acts like a weighted average. If we stretch all our data by a factor of
Proof of linearity
For a DRV:
But since
And now we can distribute the sum:
The first part of the sum is just
So we have:
For a CRV:
And again, as
The first part is again just
Note on notation here: capital
Expectation of symmetric random variable
A random variable
If
Intuitively, think of this as the centre of mass of the function. If the PDF or PMF is symmetric about a point
Proof for symmetric random variable
First, let
Then we have:
We can substitute
As as
Variance
We already saw that the expectation
If we wanted to measure how far (deviated) each possible value of
For very large
So when
This variance is therefore defined by:
Proving variance
There is a more useful form of variance, which we can prove from the definition below:
After expanding the bracket
Take the expectation of both sides:
Using the linearity of expectation, we can split and pull constants out to get:
After simplifying we have:
Linearity of variance
If
- Scaling by
stretches or shrinks the spread - Adding
shifts everything, so no change in spread
To prove this, we can use the definition of variance and some algebra
After substituting in for
We can do some cancelling of the
As
Sample median of random variables
Quantiles
For any
Standard Discrete Distributions
Bernoulli Distributions
Bernoulli trails are a name for a set of independent trials, where each trial has only two possible outcomes- success, and failure.
For a Bernoulli trial:
The Bernoulli distributions has pmf:
For this distribution, the expectation is:
And the variance is:
Binomial distribution
Defined as:
If
PMF for the Binomial
To find the PMF, we want to find
The probability of the outcomes can be given by:
So to generalize,
The pmf is:
Now one might wonder how we know that $$ \sum_{x=0}^{n}f(x) = 1$$
… by using the binomial theorem
Now if we choose
Expectation and Variance of a Binomial function
Intuitively, think of
Let
Where
Now, we know that for a single trial, the expectation of a Bernoulli variable is
And since each expectation is linear, the expectation of the sum is
Where each
So we get that expectation of a binomial is
The variance is
The proof of this is left as an exercise to the reader
Geometric Distribution
Intuitively, the geometric distribution is the first one that captures the "keep trying until you succeed" idea. So imagine we're running an experiment where:
- Each trial is independent
- Each trial has a probability of success
- We keep repeating until we get our first success
The random variable
PMF for a geometric distribution
To get a success on the
CDF
Note - R assumes the number of failures until first success, instead of the number of trials until the first success. So if
Memoryless distribution
The geometric distribution is memoryless, i.e
This means just that the probability we still have to wait for
Expectation of a geometric distribution
For the intuition, imagine playing a game where:
- Every trial has a chance
of success
How many tries do we expect to need before success?
If
If
So the average should:
- Decrease when
increases - Increase when
decreases
The proof involves using negative binomial series, something which will not be covered in lectures, but it’s in the notes. A much nicer proof is covered in 2nd year Statistical Inference module
Variance of a geometric distribution
Going back our previous analogy, the variance here is how spread out the time between our successes. So if
Hypergeometric Distribution
This distribution is all about sampling without replacement, i.e. the realistic binomial
Suppose we have a population of
- A proportion
are of type (success) - The remaining
are of type (failures)
So the total number of type
Now, we want to sample
Then it's PMF is given by:
The numerator counts how many ways to get exactly
Expectation
Notice how the expectation is the same as the binomial distribution, and that's because we are drawing without replacement
Variance
Negative Binomial Distribution
The negative binomial distribution models the number of trials needed to achieve a fixed number of successes,
If we just wanted
PMF
Imagine flipping a coin where
Expectation
Each success takes
Variance
Poisson Distribution
The Poisson distribution models the number of times an event happens in a fixed interval. It includes things like the number of emails you might get per hour, we can't predict exactly when then event happens, but over many intervals, the average rate stays the same.
So formally, It's the limit as
is large is small and is moderate
PMF
The PMF of this function can be derived by taking the limit of the binomial where we want to rearrange this and substitute for
Variance
If events occur randomly and independently, then the variability of counts around the means grows proportionally to the mean. So, the mean = variance in this case
Therefore, the expectation and variance are the same for the Poisson distribution
Uniform Distribution
PDF - as this is a continuous distribution
Expectation
Variance
Exponential Distribution
This distribution is bit like a continuous version of the geometric distribution, and it connects really nicely with the Poisson process. The exponential models the waiting time until the next event in a Poisson process. So if:
- events occur randomly and independently in time
- At a constant average rate
(events per unit time)
Then the waiting timebetween two successive events is:
So the Poisson counts how many events occur in a fixed time interval, whereas the exponential measures how long between events
The full proof involves the gamma function, which is given is the official lecture notes
Expectation
If events occur at
Variance
This one isn't immediately obvious, but the spread of waiting time grows as
CDF
The cdf for
Quantiles
As talked about earlier, quantiles tells us how far along the probability distribution we have to go to capture a certain proportion of data. So for a CRV
So we're solving for the
For the exponential distribution, recall that the cdf is
And that's our quantile function
Memorylessness (Again!)
The exponential distribution is also memoryless, as it’s just a continuous version of the geometric.
So the probability that we want to wait at least
Normal Distribution
The CDF is just
3b1b has some good videos on this
To show that sum of all probabilities is
And the standard normal
Expectation
Variance
Linear Transformation
We can also standardise any normal to get
Probabilities using tables
Given the standard normal distribution with
So if we want probability for
And then we ca use the normal CDF
Log-Normal Distributions
If
Expectation
Variance
Joint Distributions
Up to now, we've mostly dealt with one random variable at a time, eg:
And we want to know how these two relate, and that's essentially what joint distributions are about
So when we have two random variables,
Discrete Case
IF
This would like a table of probabilities, one for each combination of
- non negative
- sum to
across all
Continuous case
If
The method above uses bivariate integration, which is just the same as finding the volume under a curve if we think about integration as finding the are under a curve.
Marginal Distributions
Each random variable has its own individual distribution, even when considered together. And these are called marginal distributions. This is because we get them by summing or integrating the joint distributions along the margins.
Discrete
This basically means to get the probability of
Continuous
Expectation of
Now consider we want to find the average (expected) value of something that depends on both
This is the same as the single-variable version, but now in two dimension
Covariance
Covariance tells us how two random variables move together
The intuition behind this is essentially:
- If
and increase together - then covariance is positive - If one goes when the other goes down, it's negative
- If they move independently, then covariance is around
Correlation - normalised covariance
Correlation then, is just the scaled version of covariance so its unit free and lies between
- If the correlation is
, then there is a positive linear relationship - If it's
, then it's a negative linear relationship - If its
, then there is no linear relationship
I can’t be bothered enough to do a proof for this, so yeah.
So correlation just shows how strong and in which direction
In function terms two random variable are independent if knowing one tells us nothing about the other:
So if
Sums of Random Variables
Independent Binomial Random Variables
If
The proof is in notes, but otherwise this makes intuitive sense.
IF
Then:
This is actually a pretty neat way to derive the expectation and variance for the Binomial and the negative binomial distribution: